Through the Symmetry Lens
Part I: Planar Symmetry and Frieze Patterns
Geetha Venkataraman, in At Right Angles, provides spectacles capable of discerning symmetry in our daily life and to appreciate the many examples that prevail, that are filled with symmetry.

Symmetry seems to be very much a part of our genetic make-up. Even a young child, unschooled in matters, is able to differentiate between symmetrical or regular objects as compared with those that are irregular. Our hearing is tuned to recognise symmetry in rhythm, music and beats. We see beauty in symmetry of monuments, designs, decorations and art.
The aim of this article is two-fold. The first is to introduce the reader to the intuitive as well as the mathematical concept of symmetry. The other is to use the knowledge of symmetry to see the world around us. In a sense, the aim here is to provide spectacles capable of discerning symmetry in our daily life and to use such a device to appreciate the many examples that prevail and that are so filled with symmetry.
This article has been written in two parts.
Part‑I covers an intuitive and mathematical approach to symmetry and discusses symmetries of two-dimensional objects or shapes that can be drawn on a sheet of paper as well as symmetries of certain two-dimensional infinite patterns known as frieze patterns or strip patterns.
What is Symmetry?
A basic introduction to symmetry of finite objects was given in the Review ‘Of Monsters and Moonshine: A review of symmetry’ by Marcus Du Sautoy, published in At Right Angles, Vol. 3, No. 1, March 2014. We shall augment the same here.
Intuitively, symmetry can be thought of as an action performed on an object, which leaves the object looking exactly the same and occupying the exact same place as before. To illustrate, think of a two-person game with one person as the ‘doer’ who performs the action on the object and the second person as the ‘viewer’ who can see the action performed by the doer. Imagine however that the viewer closes her eyes while the action is performed. When she opens her eyes, if it seems as though nothing has happened to the object — i.e., it is in exactly the same state and position as it was at the start — then the doer’s action is said to be a symmetry of the object.
If on the other hand the viewer spots a change in the state of the object — say, that it has moved or has been broken — then the action is not a symmetry. A word of caution here: this game is not based on the viewer’s perception; indeed, we assume for the purposes of the game that the viewer will be able to spot any change if it has occurred.
To illustrate further, let us take a simple geometric object like a square.

Figure 1
The reader can make a cutout of a square and label the vertices A, B, C, D in the anti-clockwise direction. The labelling is simply a device used to track a symmetry. For, if the viewer has declared that nothing has changed in the object, then how do we even know that a symmetry has occurred? The markings are not considered part of the square.
The reader should also mark the back of the square with the corresponding vertices on the front and back coinciding. She should then place the cutout on a blank sheet of paper and mark its outline.
The vertex labels on the outline square should correspond to those of the cutout.
In the initial state the cutout is placed within the outline so that the vertex markings coincide. The figure below shows a light-blue cutout placed in an outlined square so that the corresponding vertices match.
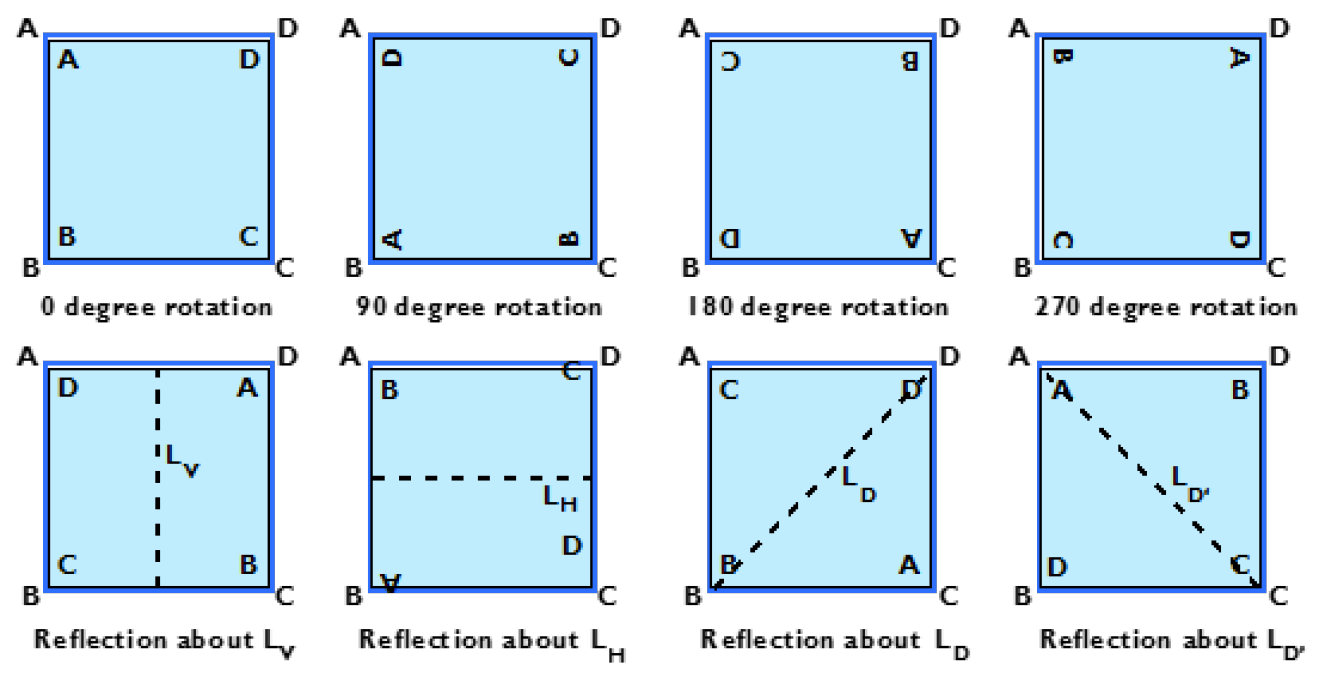
Figure 2
A symmetry of the square is an action that we can perform on the cutout such that it stays fully within the outlined square even after the action is performed. But now since the vertices have been labelled, we can track the symmetry by comparing the labels on the cutout and on the outline.
If the reader experiments with the cutout and the outline, she will be able to discover for herself that a square has 8 symmetries, as illustrated in figure 2.
The reader should convince herself that a square has these 8 symmetries and no other. This can be seen by pinning the square cutout at the centre and rotating in the counter-clockwise direction. Only when 0°, 90°, 180° and 270° rotations are performed will the cutout fit into the outline.
At other angles, the cutout will not fit into the outline.
Similarly folding the cutout along lines other than LV, LH, LD, LD’ will not see the two parts on the either side of the line overlapping exactly. So these are the only four lines about which reflection can take place. A reflection symmetry can also be seen by flipping the cutout along these lines.
From Figure 2 we note that the vertices in the cutout change position (or not) according to the symmetry. The relative positions of the vertices in the cutout with respect to those of the outline help us describe the symmetry.
Figure 3 shows how the 8 symmetries of the square are tracked.
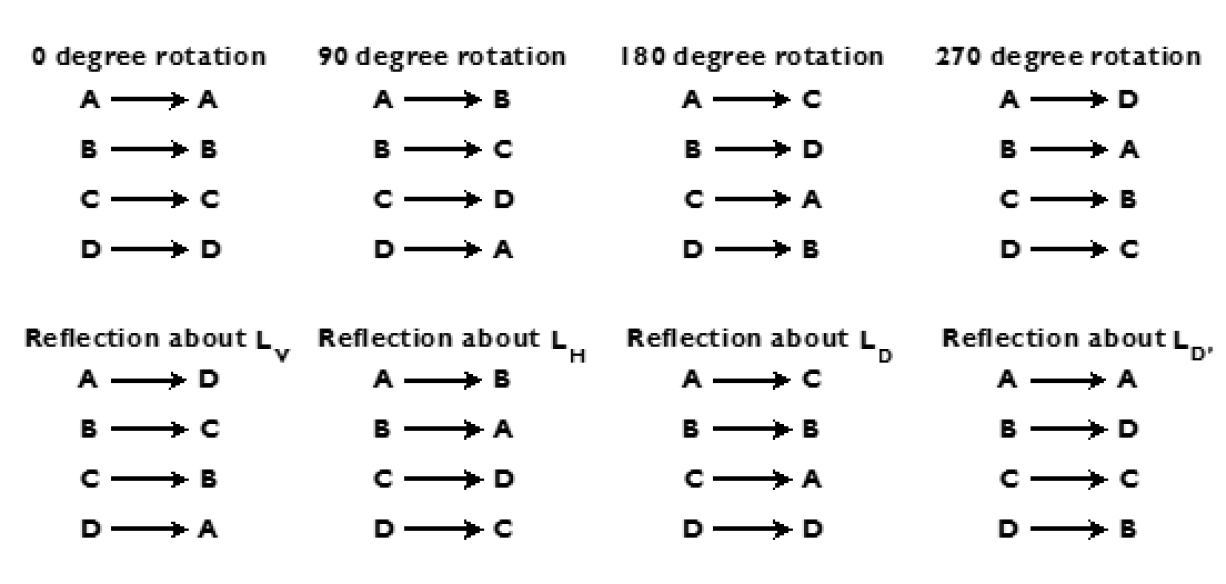
Figure 3
What we have described above is an intuitive definition of symmetry and we have also described a method for keeping track of the symmetry. While we can give a very general mathematical definition, we will confine our discussion to objects in a plane or to 3‑dimensional space.
Let X denote an object in either a plane or space. We will think of X as a collection of coordinates (either two-tuples for a planar object or three- tuples for a 3‑dimensional object). A symmetry of an object X is a bijective function from X to itself, which preserves the distance between any two points of X. In other words, a symmetry f of X is defined as follows.
- Function: f is a rule which assigns to each point x in X, a unique point in X itself, called the image of x and denoted by f(x).
- Injective: Distinct points of X get mapped to distinct points in X. That is, if a and b are two different points in X, then f(a) and f(b) will be different points of X.
- Surjective: Every point d in X is the image of some point c of X. That is, given d in X, there exists c in X such that f© = d.
- Distance preserving: For u and v in X, let d(u, v) denote the distance between the two points u and v. Then f is ‘distance preserving’ if for all points u and v in X, it happens that d(u, v) = d(f(u), f(v)). That is, the distance between any two points u and v is the same as the distance between their images f(u) and f(v).
We will denote by Sym (X) the set or collection of all symmetries of an object X.
There are some interesting observations we can make regarding symmetries. These can be seen intuitively using the working definition of symmetry or via the mathematical definition given above.
Symmetry Groups
Let f, g, h be symmetries of an object X. (The reader might find it helpful to think of X as a square.) We note that if we apply f first and then g then the result is again a symmetry of X which, we denote by g*f. In mathematical terms, * represents the composition of the functions, and the above statement says that * is closed on Sym (X). It can also be shown that * is associative, that is, (f *g)*h = f *(g*h).
Further if we consider the ‘do nothing’ function defined as IX (a) = a for all a in X, then f * IX = f = IX * f. We say that IX is an identity with respect to *. We can also show that for each symmetry f of X there exists a symmetry denoted as f ‑1 such that f * f ‑1 = IX = f ‑1 * f. The symmetry f ‑1 is called the inverse of f. It simply reverses the action of f.
Thus * on Sym (X) is a good way to combine symmetries, and Sym (X) is closed and associative; and identity and inverses exist with respect to *.
We say that Sym (X) is a group1 with respect to * and we call Sym (X) the group of symmetries of X. If f * g = g * f for all f and g in Sym (X), we say that Sym (X) is an abelian group.
The group of symmetries of an object helps in measuring symmetry, or the degree of regularity of the object. The larger the group of symmetries of an object, the more regular the object would be, and vice-versa. For example, if we were to consider Sym (X) where X is a quadrilateral, then Sym (X) would have the largest size when X is a square.
Note that a circle has infinitely many symmetries, because rotation by any angle about the centre is a symmetry as is reflection about any diameter.
If X is a regular n‑sided polygon, its group of symmetries is called the dihedral group of degree n. It is denoted as Dn. This group has 2n symmetries: n rotations and n reflections. The group of 8 symmetries of a square is denoted by D4.
A useful learning device studying a finite group is a Cayley Table. To make a Cayley Table for D4 we create a 9 by 9 grid where the top row and first column list the eight symmetries of a square in the same order. The left topmost cell is empty. The (i, j) entry in the grid will be the symmetry g*f (the symmetry f followed by the symmetry g). Here g is the entry in the first column and ith row, and f is the entry in the first row and jth column.
Figure 4 shows the Cayley Table for D4 with only (5, 5) and (5, 6) positions filled.
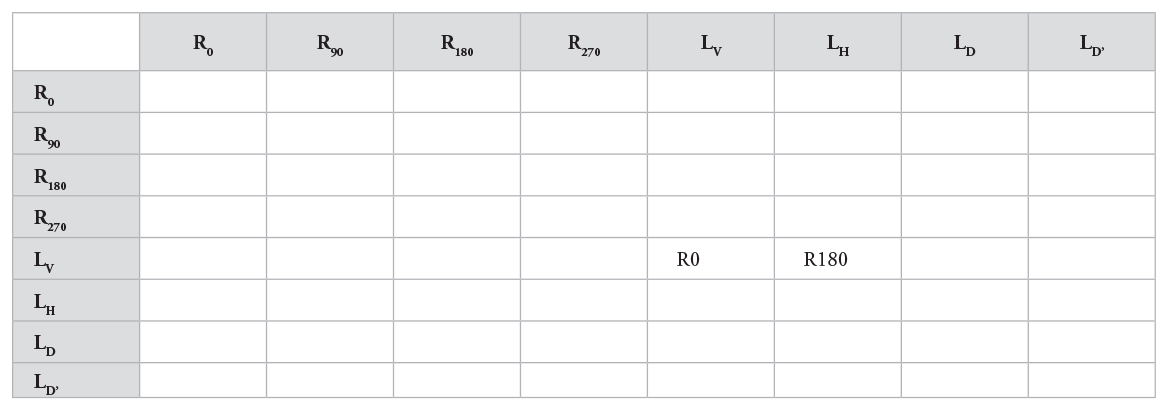
Figure 4
The reader may wish to use the cutout to compute the other entries. Note that R0 will be the identity for D4. Since LV* LV= R0, LV is its own inverse. The Cayley Table can be used to find the inverses and also check if the group is abelian.
In the rest of this article we will concentrate only on planar objects X. A few points about rotations and reflections that we ought to consider are discussed next.
In order to describe a rotation, we must specify the point about which the rotation takes place. This point will be referred to as the rotocentre. Also the direction of rotation must be specified. For planar figures, the axis of rotation will pass through the rotocentre and will be perpendicular to the plane of the object.
Every object X possesses the do-nothing symmetry or the 0° rotation symmetry. This symmetry is nothing but the identity function IX of X. If X is a scalene triangle, then Sym (X) = {IX}, that is, the only symmetry it possesses is the do-nothing symmetry.
Apart from the 0° rotation, all other rotational symmetries R of a planar object have the property that just one point remains unchanged by R; namely, the rotocentre itself. R will map every other point to a point different from itself.
In the case of a reflection symmetry L of a planar object, there is a line about which the reflection takes place. In other words, if we imagine a mirror placed along the line of reflection (lor), then L maps points to their mirror images. All points on the lor are fixed by L (mapped identically to themselves), whereas points not on the lor are mapped to their mirror images which are different from themselves.
It can be proved mathematically that finite planar objects have only rotational and reflection symmetries. Here, ‘finite’ means that a rectangle can be drawn such that the object lies entirely inside the rectangle. Another result that is very interesting says that if a planar object has only finitely many symmetries, then it will either have only rotational symmetries or an equal number of rotational and reflection symmetries.
In mathematical language, the result can be restated as follows. Let X be a planar object, and suppose that Sym (X) is a finite group. Then Sym (X) is either a cyclic2 group with n elements which are only rotations, denoted as Cn, or it is the dihedral group Dn with 2n elements, namely, n rotations and n reflections.
Figure 5 shows an example of an object with symmetry group C4. The object has no reflection symmetries and only four rotational symmetries of 0°, 90°, 180°, 270° about the point of intersection, in the anticlockwise direction. The reader should draw a Cayley Table for C4.
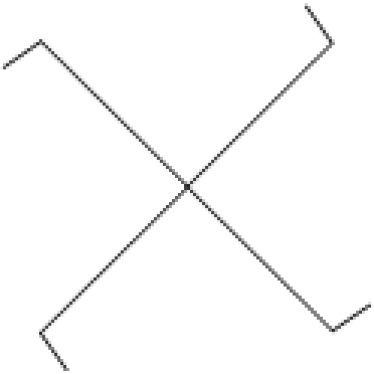
Figure 5
Strip Patterns or Frieze Patterns
We now turn our attention to infinite planar objects of certain types which will also help us analyse symmetry around us. The aim is to briefly introduce strip or frieze patterns and wallpaper patterns.
A strip pattern is created by choosing a basic motif and repeating it at equal intervals to the left and right along a horizontal line. One can imagine the number line with the basic motif sitting at every integer place. A strip pattern is an infinite pattern that runs along a line in both directions. Any line would do but for ease we work with a horizontal line. Consider the example of a strip pattern (see Figure 6) made from repeating a square motif at equal intervals.

Figure 6
Remember that the pattern is infinite and continues indefinitely both to the left and to the right.
A strip pattern has a new type of symmetry not seen in the case of finite objects. In Figure 6 we have marked an arrow of a certain length t (the distance between two motifs), pointing to the right. If we move the entire strip by a distance t along the line to the right then we see that the strip will occupy the same position as it did originally. So this describes a symmetry called a translation.
We denote it by T.
For any positive integer m, we denote by the symbol Tm the symmetry we get by moving the strip a distance mt to the right along the line, and by T‑m the symmetry we get by moving the strip a distance mt to the left along the line. The do-nothing symmetry will also be thought of as a translation symmetry in which we move by distance of 0. This is also denoted as T0.
Note that every strip pattern will have infinitely many translation symmetries. Indeed, formally, a finite object is one that does not possess a non- trivial translation symmetry (i.e., a translation symmetry which is not the do-nothing symmetry).
We say that two lines of reflection or two rotocentres of a figure are of the same type if there is a symmetry of the figure which takes one to the other. Otherwise they are said to be of different types.
In the above example, we see that there is only one horizontal reflection symmetry and vertical reflection symmetries along two different types of lines of reflection (denoted by solid and dotted lines). There are also 180° rotations in the anti- clockwise direction about two different types of rotocentres (denoted by red and pale blue circles).
In general for a strip pattern, the only rotational symmetries possible are of 0° and 180°. A 180° rotation symmetry may or may not exist. If a 180° rotational symmetry with a certain type of rotocentre exists, then there will be infinitely many rotational symmetries with that same type of rotocentre. (In our example, the centre of each square is a rotocentre of the red type.)
Similarly a reflection symmetry about a horizontal line or vertical line may or may not exist. If there is a reflection symmetry about a horizontal line, then it is unique (i.e., there can be only one such line). If there exists a reflection symmetry about a vertical line of a certain type, there will be infinitely many reflection symmetries about vertical lines of the same type. (In our example,
there are infinitely many vertical lines of reflection passing through the centres of the squares.)
We had seen earlier that for any planar object X, the set Sym (X) of all symmetries of X is closed under composition of symmetries. In this context it might be useful to consider what symmetry we get if a reflection is followed by a translation or vice-versa. In general, this yields a new kind of symmetry that is neither a reflection, nor a rotation and not even a translation. This new symmetry is called a glide reflection. Thus if T is a translation symmetry and R is a reflection symmetry of an object X, then R*T and T*R are both symmetries knows as glide reflections. A glide reflection can also be defined independently as follows.
Consider Figure 7.

Figure 7
The one on the left shows the effect of a reflection followed by a translation on the letter R. The one on the right shows the glide reflection, which is the composition of the reflection followed by the translation. (The shadow R in the figure on the right shows the intermediate position of R after undergoing a reflection about the dotted line.)
Thus a glide reflection is defined as reflection followed by a translation in a direction parallel to the line of reflection. The important fact for a glide reflection is that the translation has to occur in the same direction as that of the line of reflection. A strip pattern may or may not have a glide reflection.
It is possible to classify strip patterns on the basis of the combinations of possible symmetries of a strip pattern, namely, translation, horizontal reflection, vertical reflection, 180° rotation and glide reflection. All strip patterns are made up of just these basic elements. As may be expected, therefore, there are not too many such patterns possible. Analysis reveals that the number of different strip patterns is just seven.
Examples of the seven strip patterns are given in Figures 8 (a) and 8 (b).
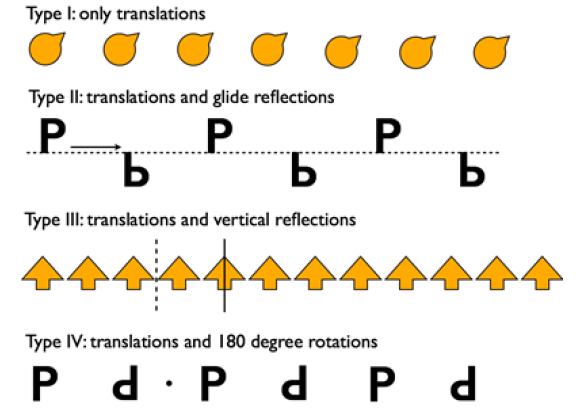

The arrows marked in the patterns show the glide length, the distance a unit of the motif has to travel before the reflection takes place. It is possible for the glide length to be different from the basic translation length for a strip pattern.
Note that in Type II, the basic motif consists of two units, a standing P and an upside down P. Thus the basic translation will be the distance between two successive motifs and in this case we could take it to be the distance between the two successive standing P’s. This is different from the glide length shown by the length of the arrow in the pattern.
Similarly in Type V, the basic motif consists of 4 units (P, reflected P, upside down P and its reflection). Here too the glide length and the basic translation length differ. However in Type VII, the glide length is also the translation length.
We conclude Part I of this article by giving examples of strip patterns that can be found in the clothes that we wear, in monuments and contemporary buildings, in fences and balcony railings among others. In a few cases we will classify these. The others are left as an exercise for the reader to undertake classification into one of the seven types.
Figure 9 shows a hand block-printing pattern used on cloth.
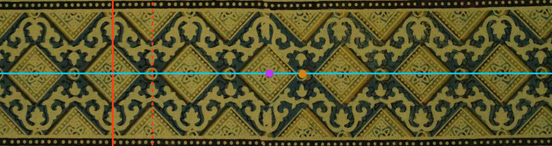
Figure 9: A strip pattern of Type VII
Such strip patterns can be typically found on borders of saris, shirts or kurtas, bedsheets, curtains etc. This strip pattern has translations, horizontal reflection, vertical reflections, glide reflections and 180 degree rotations. So it is of Type VII.
The next strip pattern (Figure 10) is a decorative motif from the Humayun’s Tomb, a 16th century monument built after the Mughal emperor Humayun’s death in 1556. The tomb located in the Nizammuddin area in Delhi has been restored beautifully and is well worth a visit – not just because it has been restored beautifully, but also from the point of view of symmetry! As it has only translations and vertical reflections, this is a strip pattern of Type III.

Figure 10: A strip pattern of Type III
The next two strip patterns (Figure 11, Figure 12) are decorative borders painted around a window in the Crafts Museum in Delhi.

Figure 11
The style of the first painting is probably Madhubani from the state of Bihar, and the second one is probably done in a Patchitra style, which is a folk art form from Orissa. The strip pattern in Figure 11 is once again of Type III as it has only translations and vertical reflections.
On the other hand, the strip pattern in Figure 12 is of Type VI as it has translations, horizontal reflection and glide reflections.

Figure 12: A strip pattern of Type VI
Some more examples of strip patterns are given below, taken from the world around us. We invite the reader to classify them according to the symmetries present. The strip patterns in Figure 13 is an example of Kalamkari artwork from Andhra Pradesh.
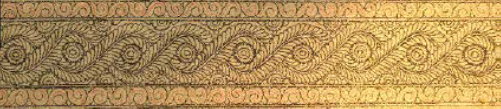
Figure 13
The pattern in Figure 14 is again an example of hand-block printing on cloth.

Figure 14
The next two strip patterns (Figure 15, Figure 16) have been taken from a balcony railing and the side railing of a bridge.


The last two strip patterns (Figure 17, Figure 18) are borders or decorative motifs from a Buddhist temple in Seoul and the beautiful Gyeongbokgung Palace originally built in the 14th century and restored now, again in Seoul.


Note:
1 A non-empty set G with a binary operation ∗ is a group if ∗ is associative, and identity and inverses exist with respect to ∗. For example, the set of integers is a group under addition.
2 A group G is called cyclic if there is an element a in G such that every element of G is basically a composed with itself finitely many times or a−1 composed with itself finitely many times. In other words every element of G is of the form am for some integer m where |m| represents the number of times either a or a−1 have been composed.
Bibliography
i. M. A. Armstrong, Groups and Symmetry, Springer Verlag, 1988.
ii. David W. Farmer, Groups and Symmetry: A Guide to Discovering Mathematics, American Mathematical Society, 1995.
iii. Joseph A. Gallian, Contemporary Abstract Algebra, 7th edition, Brooks/Cole Cengage Learning, 2010.
iv. Kristopher Tapp, Symmetry: A Mathematical Exploration, Springer, 2012.
v. Herman Weyl, Symmetry, Princeton University Press, 1952.

About the author

Geetha Venkataraman is a Professor of Mathematics at Ambedkar University, Delhi. Her area of research is in finite group theory. She has coauthored a research monograph, Enumeration of finite groups, published by Cambridge University Press, UK. She is also interested in issues related to math education and women in mathematics. She completed her MA and DPhil from the University of Oxford. She taught at St. Stephen’s College, University of Delhi from 1993 to 2010.
Geetha has served on several curriculum development boards at the school level, undergraduate level and postgraduate level. She was Dean, School of Undergraduate Studies at Ambedkar University Delhi during 2011 – 2013. She is currently Dean, Assessment, Evaluation and Student Progression at Ambedkar University Delhi.